Shadow Dexterous ROS COMPONENTS

Shadow Robot Dexterous Robotic Hands & Teleoperated Robots
The dexterity factor of our Flagship Shadow Dexterous Hand in a smaller package. Specifications Dexterous Hand Lite PDF, 800KB Move Dexterous All the movements of the human finger and thumb in the same ergonomic form factor Interact Grasping any shape Interact with all the objects a human can - in particular, we test with the full YCB object set

Dexterous Hand documentation — Dexterous Hand latest documentation
The Shadow Robot Dexterous Hand is a robot hand, with size, shape, and movement capabilities similar to those of a human hand. To give the robotic hand the ability to learn how to manipulate objects researchers from WMG, University of Warwick, have developed new AI algorithms.

Shadow Robot Dexterous Robotic Hands & Teleoperated Robots
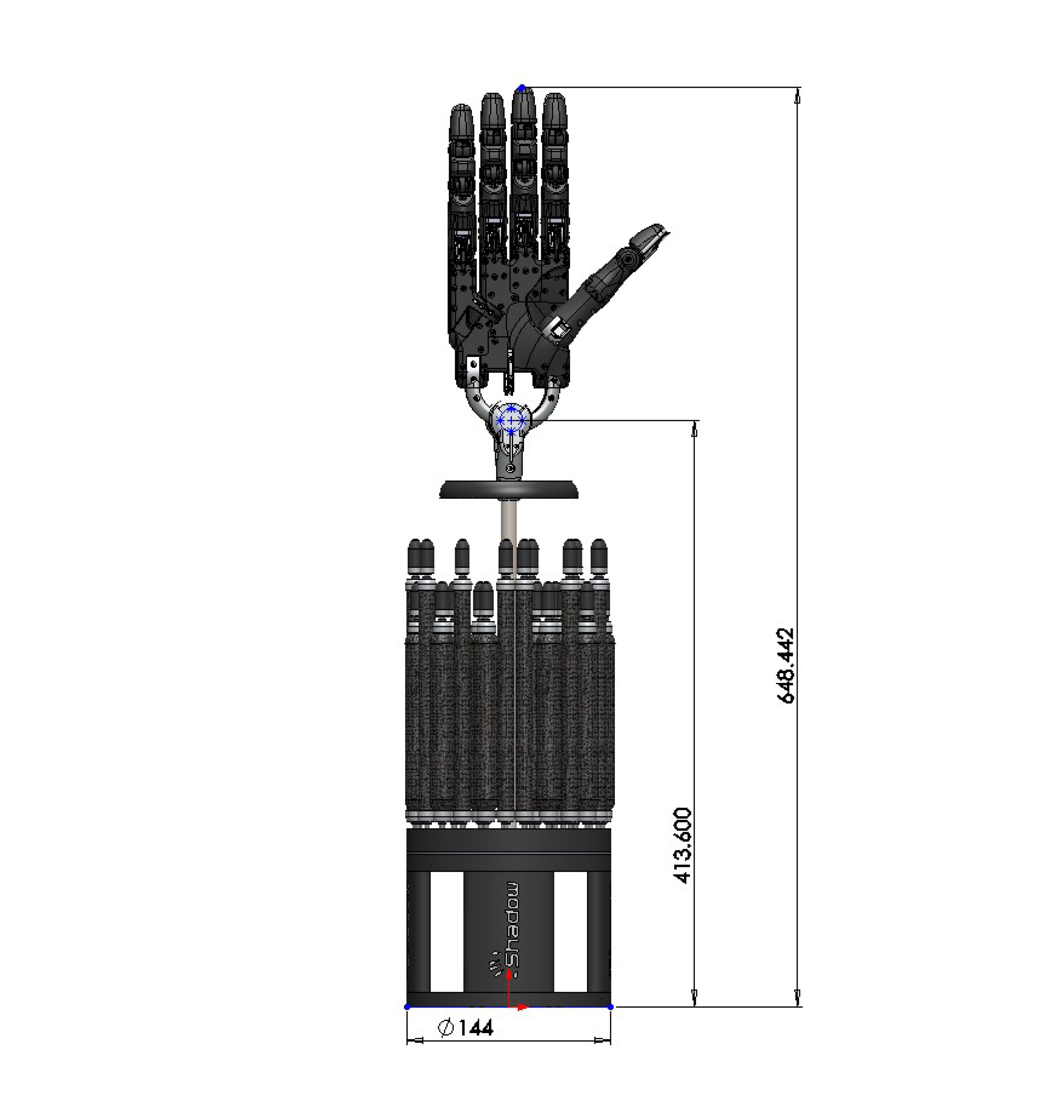
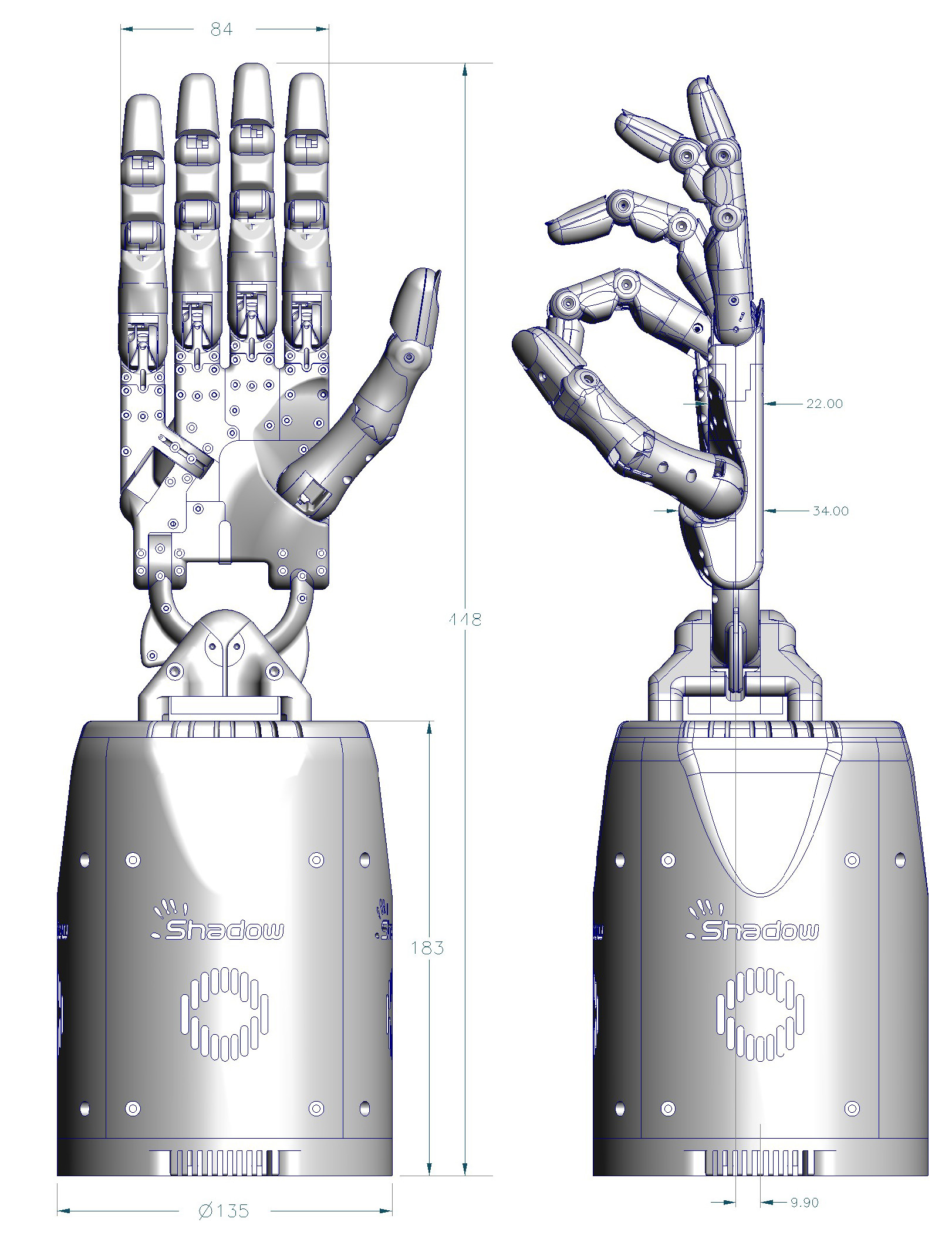
The Shadow Dexterous Hand is an advanced humanoid robot hand system that provides 24 movements to reproduce as closely as possible the kinematics and dexterity of the human hand. It has been designed to provide comparable force output and movement precision to the human hand.
Shadow Dexterous ROS COMPONENTS
The Shadow Dexterous Hand has 24 degrees of freedom compared to 7 for a typical robot arm. Noisy and partial observations. Dactyl works in the physical world and therefore must handle noisy and delayed sensor readings. When a fingertip sensor is occluded by other fingers or by the object, Dactyl has to work with partial information.

工控产品Shadow机器人灵巧手硅步机器人Shadow Dexterous Hand
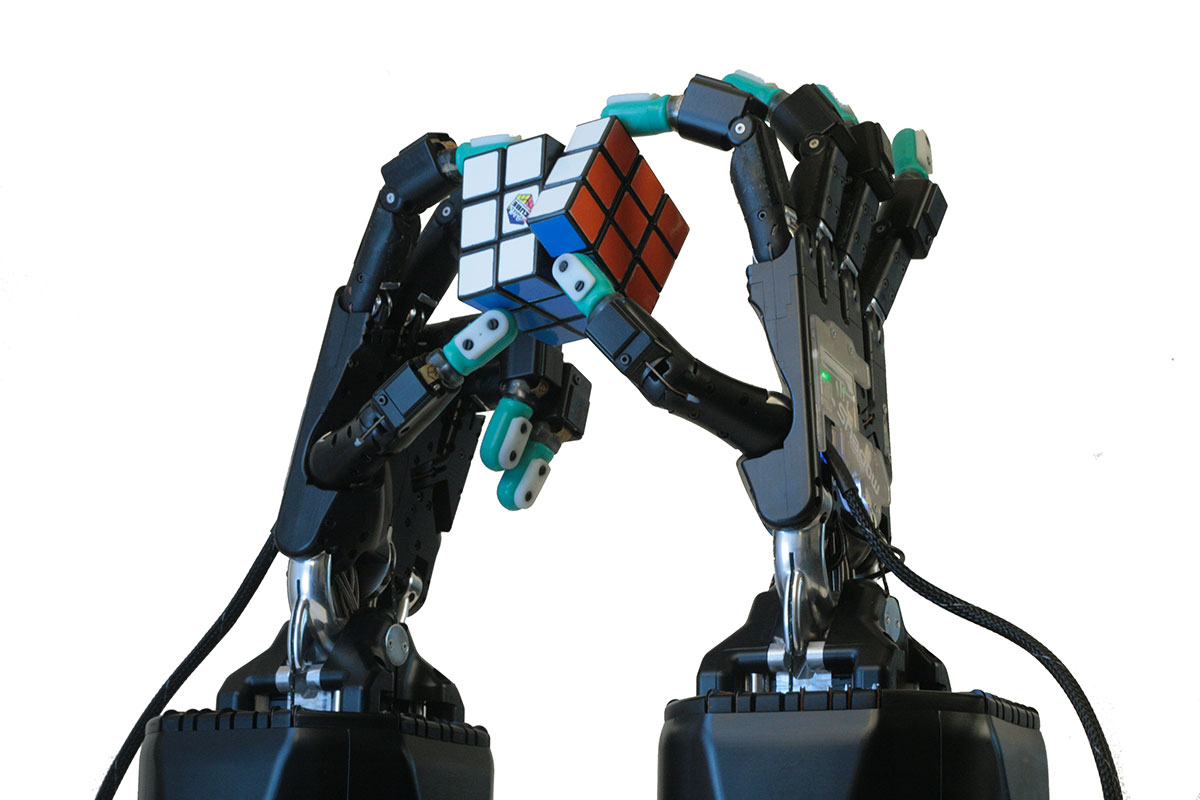
The Shadow Dexterous Hand is a truly anthropomorphic approach to robot manipulation. With 20 actuated degrees of freedom, position and force sensors, and ultra sensitive touch sensors on the fingertips, the hand provides unique capabilities for problems that require the closest approximation of the human hand currently possible.

Shadow dexterous hand and DLR hand arm system Download Scientific Diagram
Unimanual. The main xacro file to use is sr_hand.urdf.xacro when you are using only one of our hands. The following arguments are available: side - defines the side of the hand. Allowed options: right / left. hand_type - defines the type of the hand. Allowed options: hand_e / hand_g / hand_c. hand_version - defines version for particular type.
Shadow Dexterous Hand Series Research and Development Tool
The Shadow Dexterous Hand is Shadow Robot's flagship and most popular product. It's the ONLY robot hand on the market to have 24 movements and 20 degrees of freedom (DOF) for increased flexibility in grasping and manipulating a range of objects.
Dexterous Hand An Ultrasensitive New Robotic Hand With A Sense Of Touch
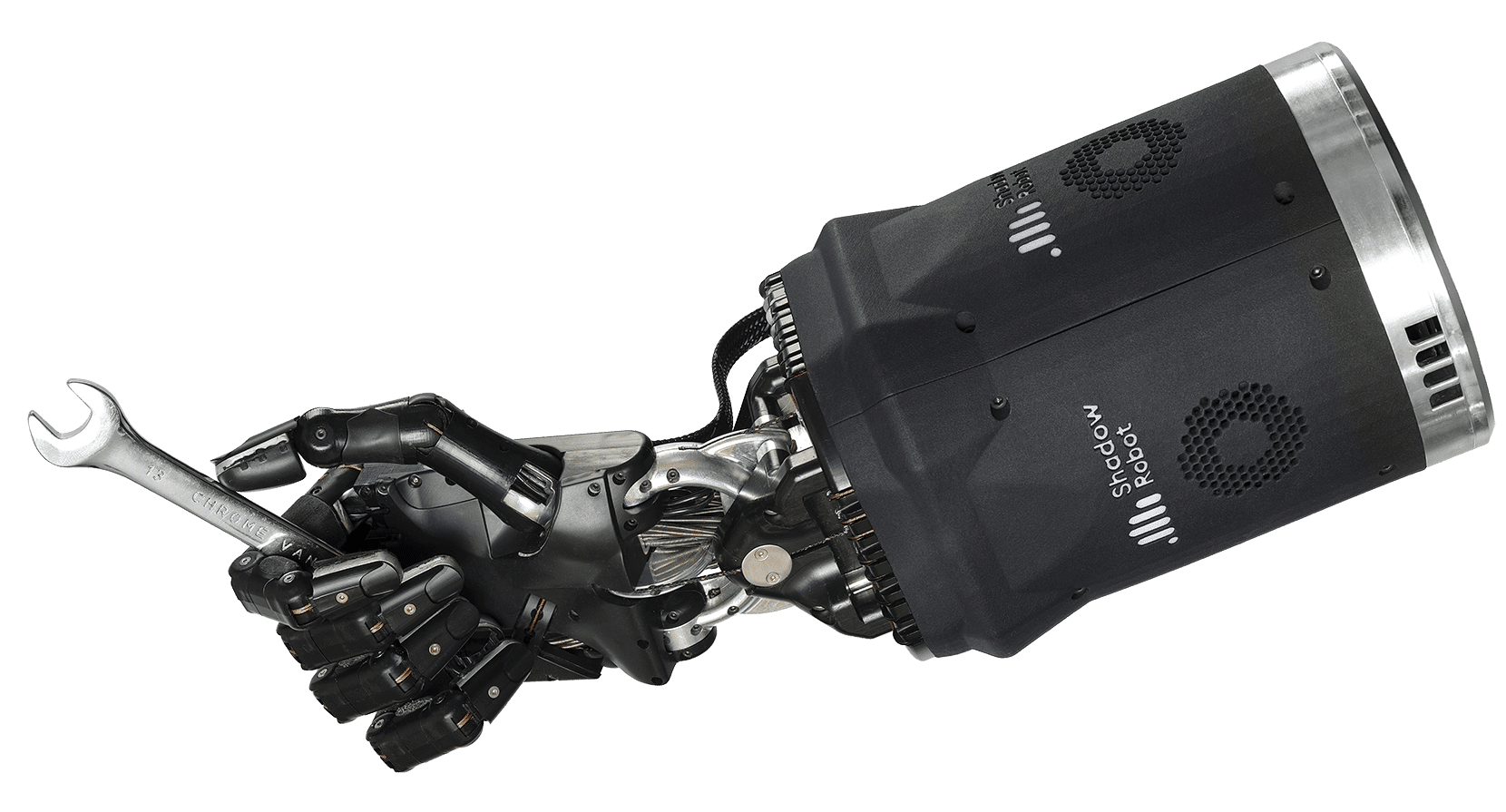
The Shadow Dexterous Hand is the most advanced 5-fingered robotic hand in the world. Offering unprecedented accuracy, The Hand can manipulate tools and objects with greater precision than ever before. Our technology opens up new avenues for research in robotics and artificial intelligence, and enables the refinement of existing technologies.

Shadow Robot Cash in the Attic Wynne Jones News
Shadow Dexterous Robot Hand Full integration with ROS Latency: 4ms (up to 1ms at 960Hz) Glove data stream works at 120 Hz (up to 960 Hz) Static Accuracy Position: 0.5mm in XYZ Hand control 1kHz Over 120 sensors and 20 motors providing 24 degrees of freedom Tendon driven: adduct and abduct movement Get more from your Shadow Dexterous Hand

Shadow Robot AI Algorithms Bring Robot Hands One Step Closer To Human AI Summary
Shadow Dexterous Hand Lite by Shadow Overview The new Shadow Hand Lite puts the full dexterity of the Shadow Hand design into a smaller, lighter, and cheaper package. By removing a finger and the wrist, and shrinking the forearm, Shadow's engineers have produced a compact yet highly capable dexterous manipulator for the wider world.
Shadow Dexterous ROS COMPONENTS
The Dextrous Hands have over 100 sensors running at up to 1KHz, giving you insight and accurate data points supporting your research. Our robots are an incredible source of data with our Hand being an unrivalled system available to researchers around the globe.
GitHub shadowrobot/shadow_dexterous_hand Meta package for the Shadow Dexterous Hand.
Our Dexterous Hands have 20 degrees of freedom, 24 movements and 120 sensors for unprecedented accuracy Designed with modularity in mind to easily integrate into existing set ups Customisable set up and consultancy to ensure the system meets your specifications
Shadow Robot’s Dexterous Hand can do more than cook up a storm Robohub
The Shadow Dexterous Hand ( ShadowRobot, 2005) is an example of a robotic hand designed for human-level dexterity; it has five fingers with a total of 24 degrees of freedom (DoFs).

The Shadow Hand is the closest robot Hand to the human Hand available.
Robotic dexterous hands provide a promising base for supplanting human hands in the execution of tedious and dangerous tasks. One of the essential goals of dexterous hands is autonomous manipulation in unstructured environ- ments.

Pin on tech and stuffs (real life scifi source)
The Shadow Dexterous Hand is a humanoid robot hand system developed by The Shadow Robot Company in London. The hand is comparable to a human hand in size and shape, and reproduces all of its degrees of freedom.

Dexterous Hand Series Shadow Robot
The Shadow Dexterous Hand, often shortened to Shadow Hand, is part of the Shadow Hand Dexterous Series. The Shadow Dexterous Hand is a truly anthropomorphic approach to robot manipulation.
